Ir al contenido
Electrónica DR
Tienda
Términos y Condiciones
Contacto
Tienda
Términos y Condiciones
Contacto
0
Buscar productos
Electrónica DR
Buscar productos
Tienda
Términos y Condiciones
Contacto
Tienda
Términos y Condiciones
Contacto
0
Inicio
/ Productos etiquetados “proyecto robótica 2WD”
proyecto robótica 2WD
Mostrando el único resultado
Orden por defecto
Ordenar por popularidad
Ordenar por calificación media
Ordenar por las últimas
Ordenar por precio: bajo a alto
Ordenar por precio: alto a bajo
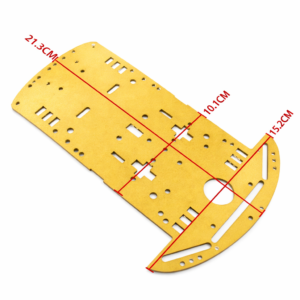
Base De Acrilico Para Carro Robot 2WD
$
39.00
Añadir al carrito
Nombre de usuario o dirección de correo electrónico
Contraseña
Recuérdame
¿Olvidaste tu contraseña?
Nombre de usuario
Correo electrónico
Contraseña
Teléfono
Escuela
Nombre de usuario o dirección de correo electrónico